
Software-Defined Vehicle Plattform
Offene SDV-Plattform für standardisierte, sichere und flexible Fahrzeugarchitekturen mit dynamischer Homologation
Die Software Defined Vehicle Plattform bietet eine einheitliche, offene und hardwareunabhängige Basis für moderne Fahrzeugsoftware. Sie kombiniert sichere, modulare Softwarekomponenten mit einer standardisierten Ausführungsumgebung – reproduzierbar, portabel und über den gesamten Lebenszyklus aktualisierbar.
Durch offene Schnittstellen, isolierte Laufzeitumgebungen, integrierte Shadow-Mode-Validierung und formale Safety-Mechanismen wird die Plattform zur Grundlage für skalierbare, herstellerübergreifende SDV-Architekturen.
Offen & standardisiert
Wasm Component Model, sprachunabhängige WIT-Schnittstellen, konsistente Interoperabilität.
Sicher & isoliert
Sandbox-Laufzeit, Freedom from Interference, automatisierte Safety-Evidenz bis ASIL D.
Hardwareagnostisch
x86, ARM, RISC-V, GPU, FPGA – identische Binaries von der Simulation bis ins Fahrzeug.
Dynamisch zertifizierbar
Komponentenweise Homologation, selektive OTA-Updates, kürzere Releasezyklen.
Von der Domäne zum Zentralrechner
Die E/E-Architektur des Fahrzeugs entwickelt sich von dezentralen Domänen-Steuergeräten über zonale Controller hin zu zentralen Hochleistungsrechnern. Die OSxCAR-Plattform begleitet jede Stufe dieser Evolution – und ermöglicht Mischbetrieb aus klassischen und SDV-basierten Komponenten.
„Eine Plattform für alle Generationen – vom Legacy-ECU bis zum L3+-Zentralrechner."
01 – Offene & Standardisierte Architektur
Die Plattform setzt auf offene Standards wie das WebAssembly Component Model und sprachunabhängige Schnittstellen (WIT). Dadurch entsteht eine konsistente Interoperabilität zwischen Softwarebausteinen – unabhängig von Programmiersprache, Betriebssystem oder Hardware.
Komponenten können frei kombiniert, versioniert, wiederverwendet oder ausgetauscht werden, wodurch Integrationskosten sinken und Innovation beschleunigt wird.
Proprietäre Stacks erzeugen Abhängigkeiten. WIT + Component Model entkoppeln Hersteller, Sprache und Plattform – jede Komponente wird austauschbar, jede Schnittstelle versionierbar.
02 – Sichere, isolierte Ausführung
Speichersichere Laufzeitumgebungen und Sandbox-Mechanismen stellen sicher, dass Komponenten strikt voneinander isoliert laufen (Freedom from Interference). Dies ermöglicht die sichere Ausführung sowohl sicherheitskritischer Funktionen als auch experimenteller oder KI-basierter Module – ohne das Gesamtsystem zu gefährden.
- Speichersicherheit: Kein unkontrollierter Zugriff zwischen Modulen – capability-basierte Isolation
- Fehlerisolation: Absturz eines Moduls bleibt lokal begrenzt, das Gesamtsystem läuft weiter
- Safety-Evidenz: Automatisierte Nachweisführung für Zertifizierungsprozesse bis ASIL D
- Formale Verifikation: Geplante Mechanismen von der Komponente bis zum Gesamtsystem
Isolation als Sicherheitsprinzip
Jede Komponente läuft in einer eigenen Sandbox mit minimalen Rechten. Speicherzugriffe, Systemaufrufe und Kommunikationskanäle sind strikt kontrolliert – ein Fehler in Modul A kann Modul B niemals beeinflussen.
„Freedom from Interference – nicht als Konzept, sondern als Laufzeitgarantie."

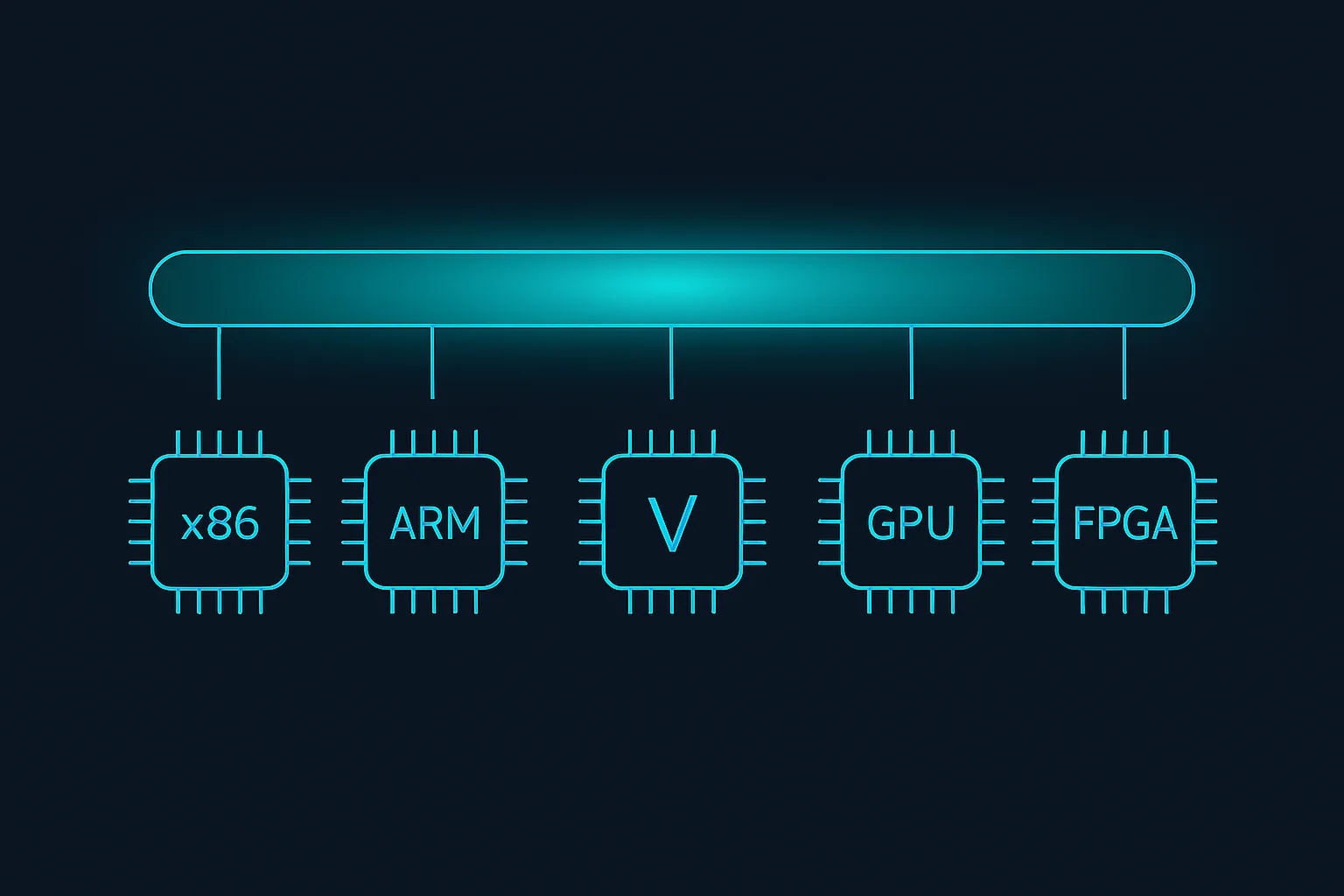
03 – Flexibel & hardwareagnostisch
Die Plattform unterstützt alle relevanten Compute-Architekturen – x86, ARM, RISC-V, MCUs, GPUs, FPGAs und domänenspezifische Beschleuniger.
Dank des „One Binary“-Ansatzes laufen identische Softwaremodule über alle Stufen der Validierung:
- MIL / SIL: Frühzeitige Validierung rein in der Simulation – ohne Hardware
- HIL: Reale Steuergeräte mit simulierten Signalen – echtes Timing, kontrollierte Umgebung
- VIL: Integration im Fahrzeugkontext – physische Schnittstellen, reale Bus-Systeme
- On-Vehicle: Identischer Code im Zielfahrzeug – einmal entwickelt, überall lauffähig
Ein Binary – alle Plattformen
Ob x86-Server, ARM-basiertes Zonensteuergerät oder RISC-V-Mikrocontroller – die kompilierte Wasm-Komponente bleibt identisch. Kein Re-Compile, kein Plattform-spezifischer Glue-Code.
„Einmal entwickelt, überall lauffähig – von der Simulation über die Testbench bis ins Fahrzeug."
04 – Dynamische Homologation
Statt komplette Fahrzeugsoftware neu zu zertifizieren, können einzelne Komponenten selektiv aktualisiert und erneut bewertet werden. Dynamische Homologation wird damit zum Schlüssel für SDV-Lebenszyklen.
- Selektiv: Nur geänderte Komponenten werden neu bewertet – der Rest bleibt zertifiziert
- Schnell: Feature-Rollouts in Wochen statt Monaten
- Effizient: Geringere Zertifizierungskosten pro Release-Zyklus
- Flexibel: Risikoarme OTA-Updates und kontinuierliche Architektur-Evolution
Vom Monolith zum Modul
Klassische Homologation erfordert die Re-Zertifizierung des Gesamtsystems bei jeder Änderung. Dynamische Homologation zerlegt diesen Prozess: Nur die tatsächlich geänderte Komponente wird neu bewertet – der Rest bleibt zertifiziert.
„Komponentenweise Zertifizierung ermöglicht Feature-Rollouts in Wochen statt Monaten."
05 – Shadow Mode – Validierung im Fahrzeug
Neue Features laufen parallel zur produktiven Logik, empfangen reale Fahrzeugdaten und generieren Vergleichsausgaben, ohne in Fahrzeugfunktionen einzugreifen. Shadow Mode bildet die Brücke zwischen Labor-Tests und realer Fahrzeugwelt.
- Flotten-Validierung: Unter Realbedingungen über tausende Fahrzeuge hinweg testen
- A/B-Testing: Risikofreier Vergleich neuer Algorithmen gegen produktive Logik
- Datenbasierte Optimierung: Reale Fahrdaten als Grundlage für iterative Verbesserung
- OTA-Vorbereitung: Sichere Validierung vor dem produktiven Rollout
Vom Labor in die Flotte
Was auf der SDVA-Testbench funktioniert, wird im Shadow Mode unter realen Flottenbedingungen final abgesichert. Neue Algorithmen laufen parallel zur Produktion – risikofreie Validierung über tausende Fahrzeuge, bevor ein einziges OTA-Update live geht.
„Feature-Rollouts in Wochen statt Monaten – selektiv aktualisiert, komponentenweise zertifiziert."

06 – Roadmap – Zukünftige Erweiterungen
Die Weiterentwicklung der Plattform konzentriert sich auf fünf Schwerpunkte: Einführung formaler Methoden und automatisierter Safety-Analyse für höchste Sicherheitsanforderungen. Ziel ist die durchgängige, werkzeuggestützte Nachweisführung von der Komponentenebene bis zum Gesamtsystem – als Basis für die Zertifizierung sicherheitskritischer SDV-Funktionen. Durchgängige Evaluierung komplexer ADAS-Systeme von der Simulation bis zum Fahrbetrieb. Re-Simulation ermöglicht die Wiedergabe realer Szenarien in kontrollierter Umgebung – für reproduzierbare, skalierbare Validierung. Signierte, versionierte und modulare OTA-Updates für skalierbare SDV-Flotten. Komponentenweise Aktualisierung statt monolithischer Releases – mit integriertem Rollback, Audit-Trail und dynamischer Homologation. GNN-basierte Optimierung von Latenz, Pfadwahl und Software-Platzierung in heterogenen Fahrzeugnetzwerken. Trainiert auf realen Bench-Daten, validiert im Shadow Mode. Demonstration einer vollständig portablen, sicheren und OEM-agnostischen Ausführungsumgebung auf Basis des WebAssembly Component Model. Nachweis der Praxistauglichkeit für automotive Einsatzszenarien.Safety Formal Proof Richtung ASIL D
Testing ReSim + End-to-End-Testframework für ADAS
Deployment Fleet-ready OTA-Pfad
KI KI-optimiertes Networking
Outlook WebAssembly Proof of Concept
Flotten-Updates, nicht Einzelkämpfe
Signierte, versionierte OTA-Pakete erreichen tausende Fahrzeuge gleichzeitig. Komponentenweise Updates statt monolithischer Releases – mit integriertem Rollback, Audit-Trail und dynamischer Homologation als Absicherung.
„Vom Cloud-Build bis zum Fahrzeug – durchgängig signiert, versioniert und nachvollziehbar."

Für jede E/E-Architektur geeignet
Ob Legacy-Domänenarchitektur, zonale Topologie oder zentrale Hochleistungsrechner – die Plattform passt sich flexibel an jede Fahrzeuggeneration an und ermöglicht Mischbetriebe aus klassischen und SDV-basierten Komponenten.
Legacy-Domänen
Dezentrale Steuergeräte nach Funktion getrennt: Powertrain, Chassis, Infotainment. Bewährt, weit verbreitet – die Plattform integriert sich nahtlos.
Zonen-Controller
Regional gruppierte Controller nach Fahrzeugbereichen. Reduzierte Verkabelung, höhere Effizienz – Übergang zur Software-definierten Architektur.
Zentral-Computer
Hochintegrierte Plattformen für L3+ Autonomie. Alle Funktionen zentralisiert, maximale Rechenleistung – die Zukunft der E/E-Architektur.
Kurz gesagt
Die SDV-Plattform schafft eine Grundlage, in der:
- Modularität: Software ist sicher, wiederverwendbar und unabhängig kombinierbar
- Portabilität: Hardware ist keine Barriere mehr – ein Binary für alle Zielplattformen
- Agilität: Homologation funktioniert dynamisch und komponentenweise
- Intelligence: KI und ReSim sind direkt in Entwicklung und Validierung integriert
- Geschwindigkeit: OTA, Shadow Mode und Safety-Automatisierung verkürzen Releasezyklen drastisch
Eine moderne, offene Grundlage für das Software Defined Vehicle der nächsten Generation.
Weitere Technologie-Seiten: Künstliche Intelligenz · WebAssembly · Testplattform